

Mailman
Mailman è un protocollo di comunicazione low level progettato per il controllo real time di robot mobili attraverso una rete wireless.
La necessità di un nuovo protocollo sorge dalle nuove sfide che la comunicazione senza fili introduce, sfide che nei network con fili erano già state superate.
La latenza punto-punto in una rete wireess è tipicamente nell’ordine compreso tra poche e qualche decina di millisecondi. Al contrario, una rete Ethernet creata con strumenti disponibili sul mercato odierno necessita solamente di qualche microsecondo per trasmettere un frame.
Nell’utilizzo tipico, la larghezza di banda disponibile in una rete con 802.11x (WiFi) è molto minore della teorica larghezza di banda massima che la tecnologia pubblicizza di supportare.
Sia la latenza che la larghezza di banda sono affette sfavorevolmente quando la rete è dislocata in una zona sconosciuta. Ostacoli che riflettono o bloccano le onde radio, angoli tra trasmettitore e ricevitore, distanza tra i punti di comunicazione e interferenze da altre reti o strumenti radio, combinati assieme creano una sera sfida alla comunicazione.
D’altro canto, le applicazioni robotiche al giorno d’oggi richiedono la capacità di trasmettere grandi quantità di dati, la maggior parte sensibili ai ritardi. Fotogrammi video da telecamere a bordo, dati provenienti da sensori, feedback dai comandi simili popolano il traffico dalle unità remote alle stazioni base. Nella direzione opposta ci sono comandi di navigazione, comandi operativi e comandi critici che viaggiano dalla stazione base all’unità remota.
Ogni tipo di flusso di dati ha differenti caratteristiche ed esigenze. Ad esempio, un flusso di video in real time trasmesso dall’unità remota ad un operatore nella stazione base che controlla i comandi di navigazione richiede che il ritardo tra ogni frame sia sempre quasi lo stesso in modo da ottenere un flusso video fluido. In questo caso, una soluzione come il buffering non è accettabile perché l’immagine deve arrivare in tempo reale. Ritardi casuali generano tremolii, che rendono l’output inutile per l’operatore.
Un altro tipo di dati sono i comandi di emergenza. Per esempio, se un robot si trova in un’area con gas esplosivi, l’operatore potrebbe voler disabilitare alcuni componenti elettronici per minimizzare i rischi di causare un incendio o un’esplosione. Un comando del genere dovrebbe essere trasmesso all’unità remota col minimo ritardo possibile, con priorità massima rispetto agli altri tipi di traffico.
Mailman è progettato per offrire una soluzione a questi problemi, attraverso un “pianificatore di pacchetti” che impiega algoritmi di modifica del traffico per trasmettere dati basati sulla loro priorità, il ritardo massimo e la larghezza della banda disponibile.
Mailman utilizza UDP/IP in modo tale da minimizzare l’overhead della comunicazione per le applicazioni streaming come feed video e sensori. Crea trasmissioni affidabili su UDP che possono essere attivate su richiesta dall’utente.
Il protocollo permette agli utenti di definire la priorità, i valori di ritardo massimo ed altri parametri per i datagrammi in uscita.

IES possiede un’implementazione del protocollo Mailman, che comprende un server ed una biblioteca per l’utente. Lo spazio/biblioteca fornisce un set di API di alto livello che attuano il protocollo e forniscono inoltre servizi addizionali come ricerca di server. È inoltre possibile utilizzare le funzioni di livello minore della biblioteca per creare diagrammi da inviare al server tramite UDP.
Wi-MAX
IES has volto test sul campo sull’equipaggiamento 802.16d-2004 per valutare le performance rispetto a latenza, larghezza di banda e ricezione del segnale. Il sito del test è stata una location utilizzata per addestrare personale specializzato a rispondere a situazioni di crisi, disastro ed emergenza. Alcuni punti del teste erano in Line Of Sight (LOS) con la stazione base, mentre la maggiorparte erano Not on Line Of Sight (NLOS). Uno dei test è stato inoltre condotto dall’interno di un tunnel.
I software utilizzati per lo svolgimento dei test sono Iperf, Netperf ed altri programmi personalizzati.
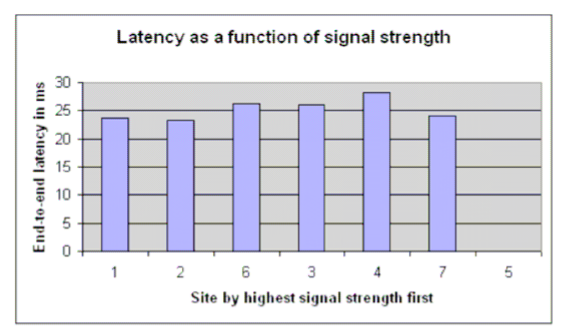
La figura seguente mostra come la latenza rimane costante su differenti punti di test (differente forza del segnale, dovuta alla variazione di distanza dalla stazione base)
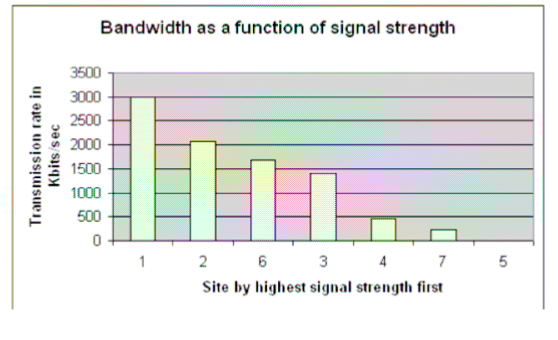
Il prossimo grafico mostra la variazione della larghezza di banda, come funzione della forza del segnale.
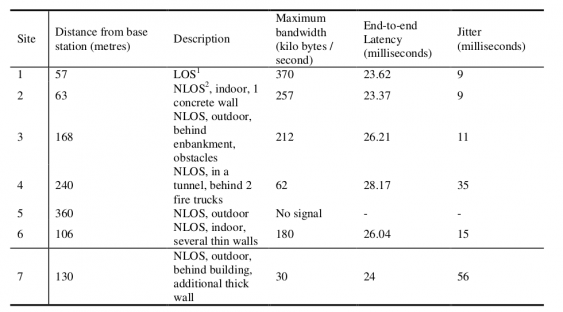
La tabella qui sotto rappresenta un resoconto dei risultati dei test riguardanti i parametri principali (larghezza di banda massima, latenza end-to-end e tremolio) nei differenti punti di testi ed in differenti situazioni (LOS, NLOS, all’interno di un tunnel, ecc.):
IES sta sviluppando un progetto pilota con equipaggiamento 802.16d che sarà fornito da un leader del mercato degli strumenti Wi-MAX.
Per ulteriori informazioni sui report dei test, sulle soluzioni Wi-MAX e su Mailman, non esitate a scriverci tramite il contact form.